5.4 KiB
Binary search
Binary search is an efficient search algorithm based on the divide-and-conquer strategy. It utilizes the orderliness of data, reducing the search range by half each round until the target element is found or the search interval is empty.
!!! question
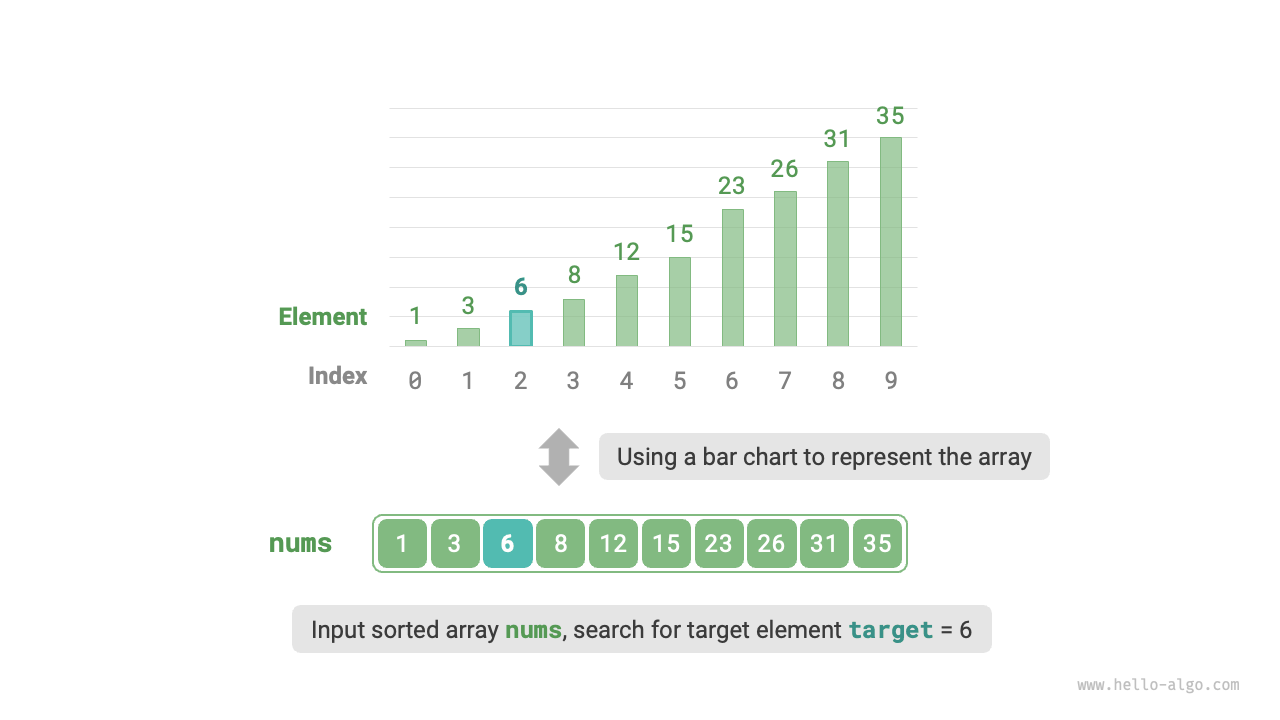
Given an array `nums` of length $n$, with elements arranged in ascending order and non-repeating. Please find and return the index of element `target` in this array. If the array does not contain the element, return $-1$. An example is shown below.
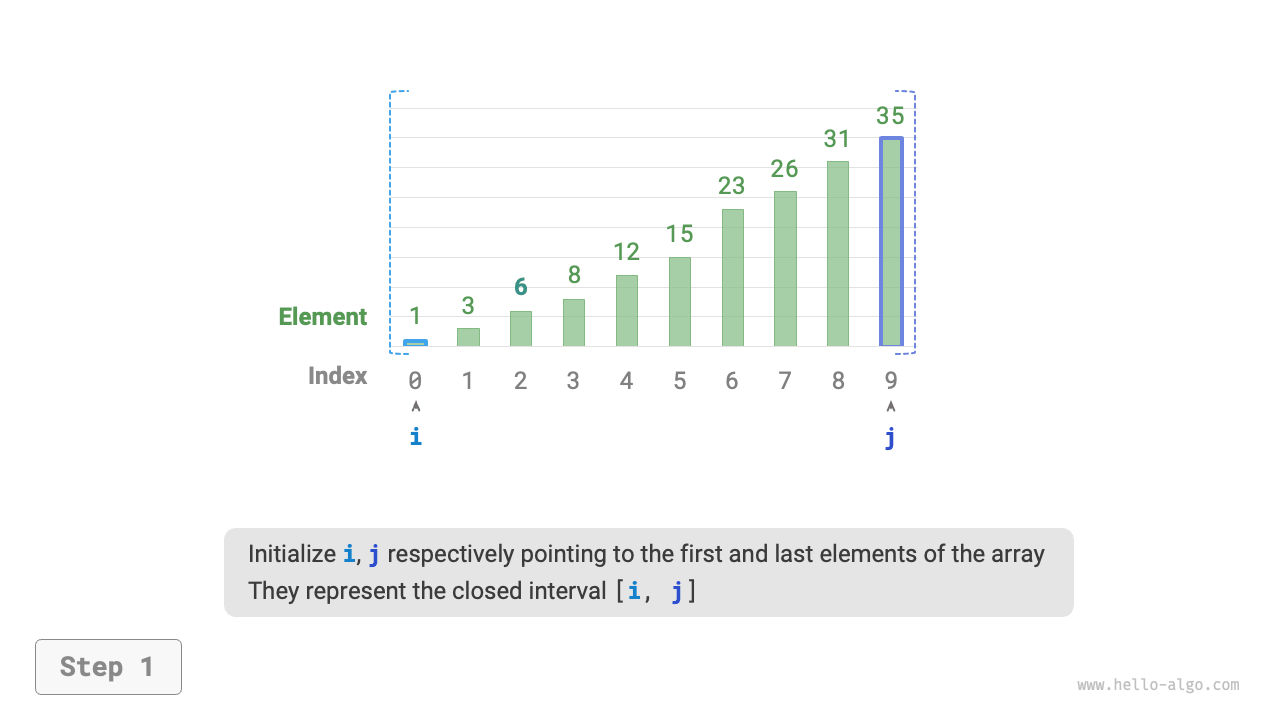
As shown in the figure below, we first initialize pointers i = 0 and j = n - 1, pointing to the first and last elements of the array, representing the search interval [0, n - 1]. Please note that square brackets indicate a closed interval, which includes the boundary values themselves.
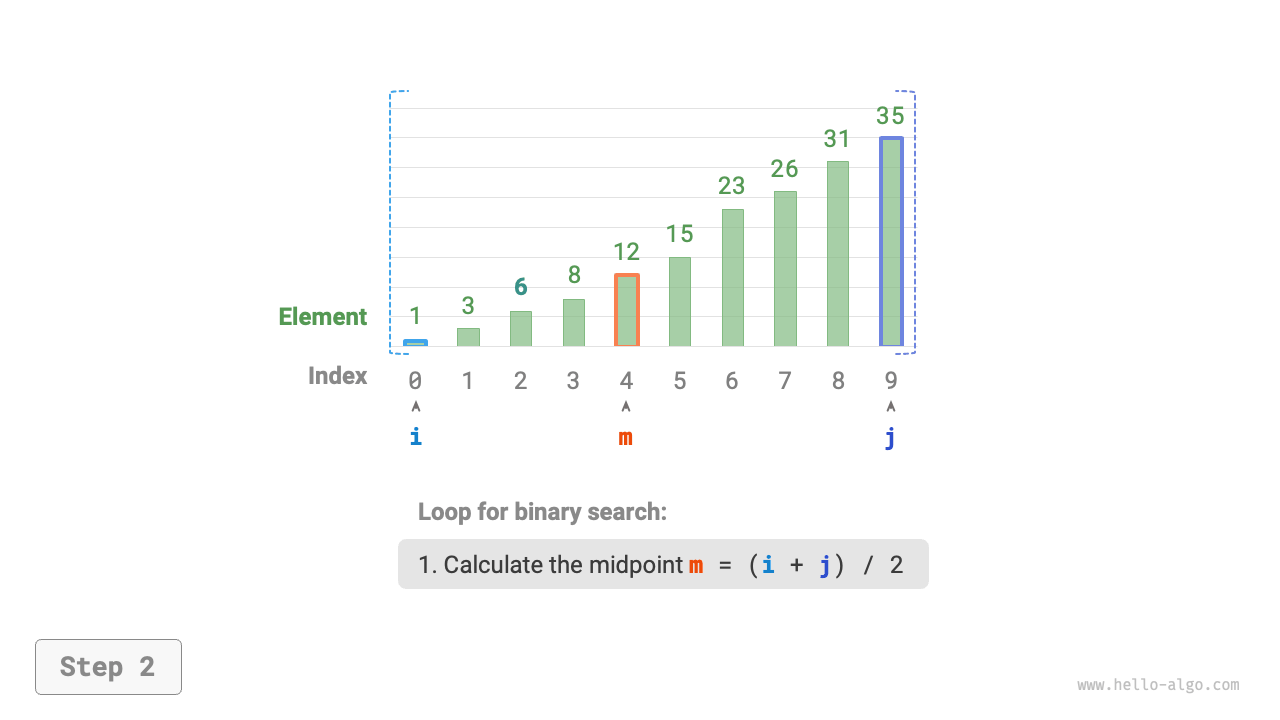
Next, perform the following two steps in a loop.
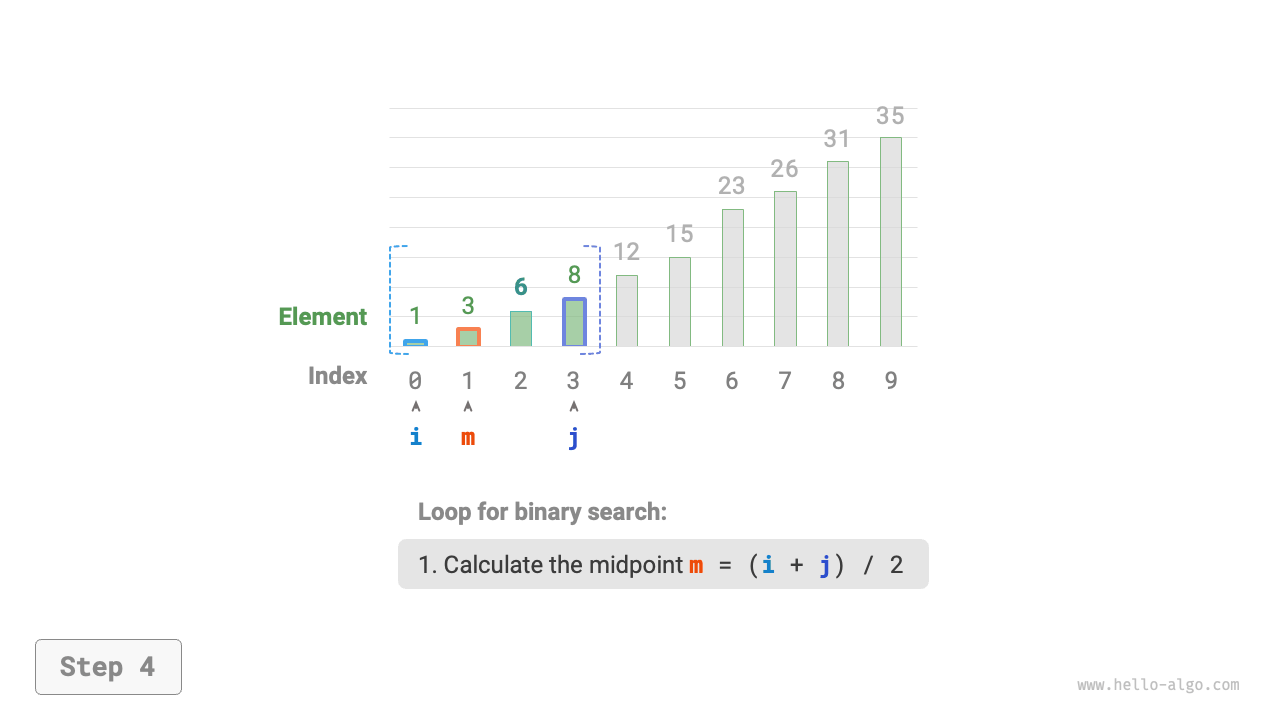
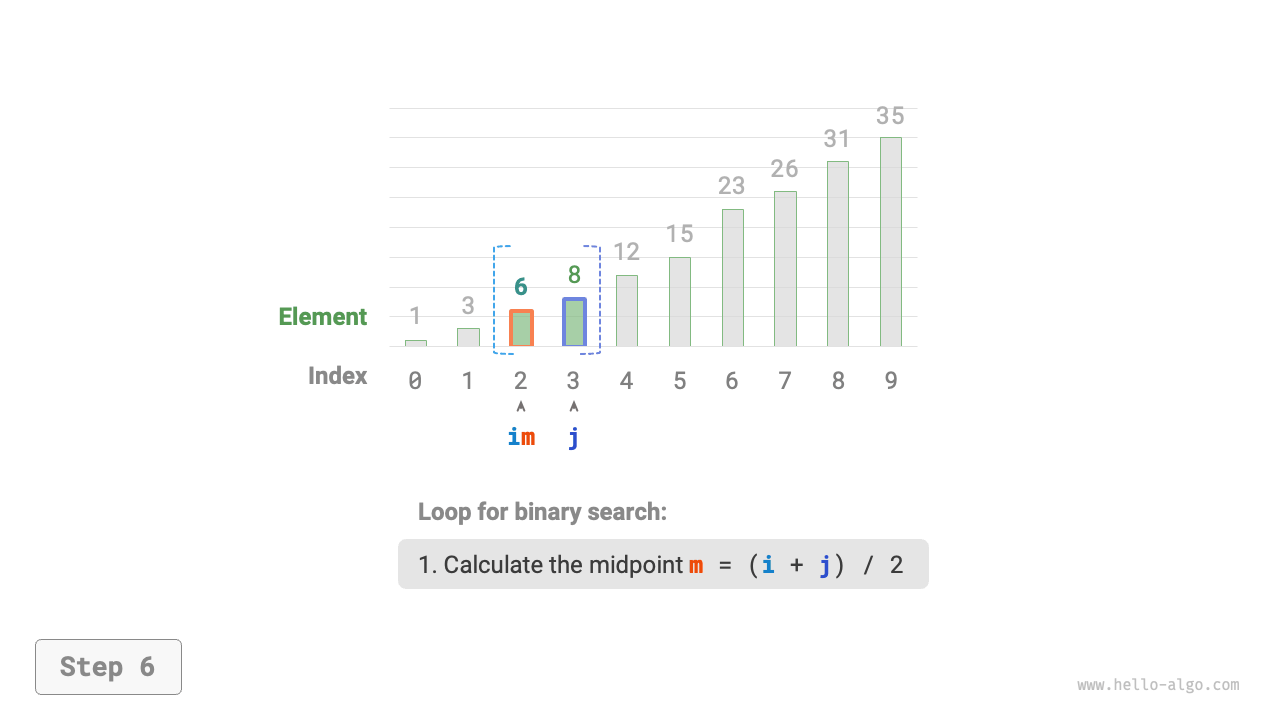
- Calculate the midpoint index
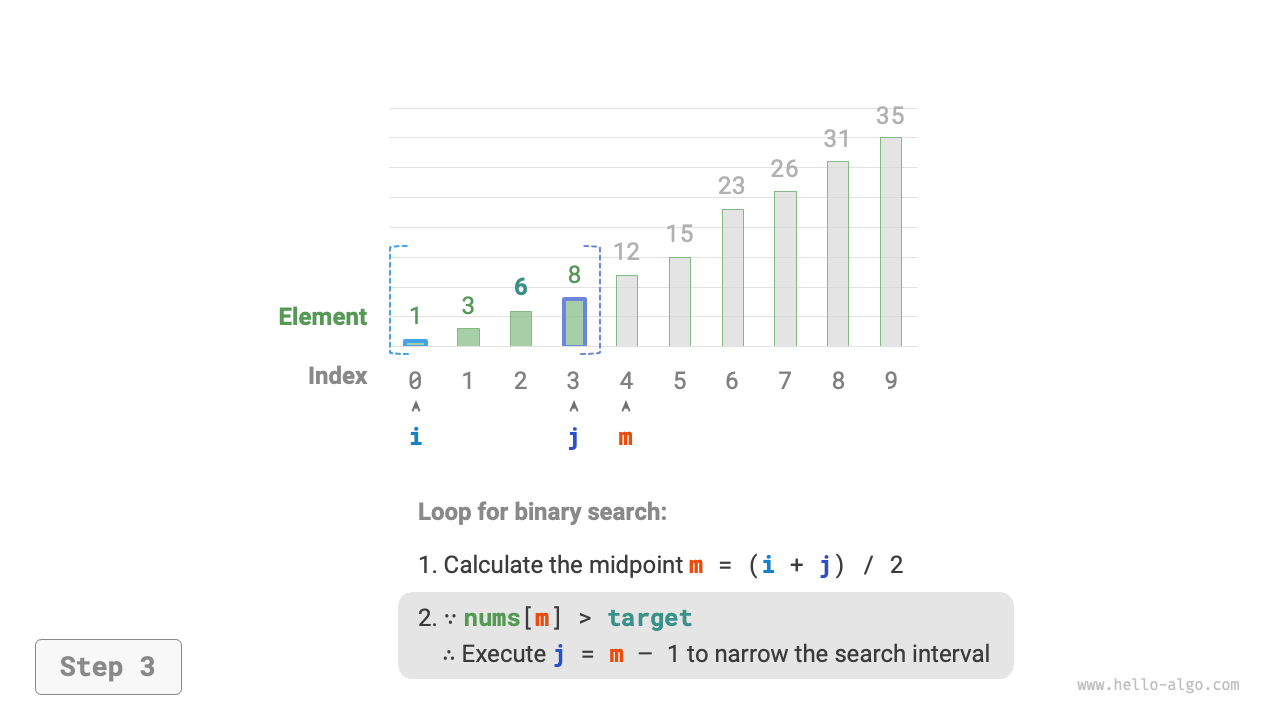
m = \lfloor {(i + j) / 2} \rfloor, where\lfloor \: \rfloordenotes the floor operation. - Compare the size of
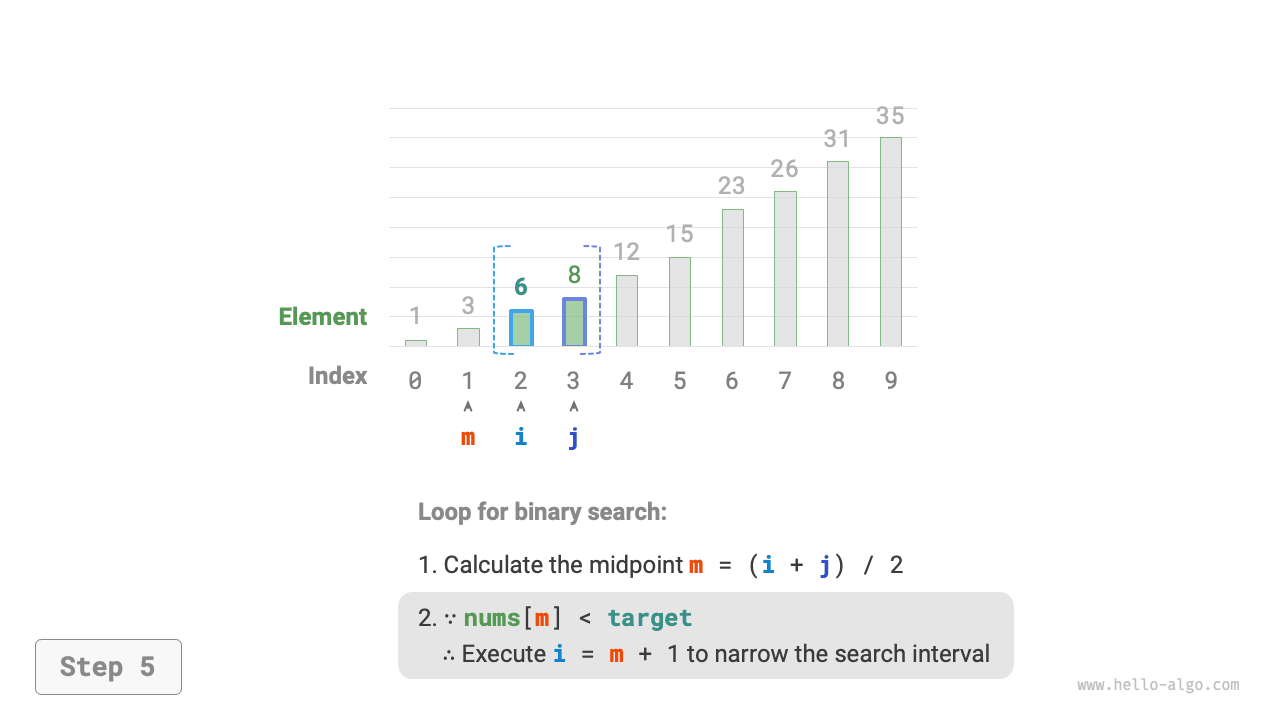
nums[m]andtarget, divided into the following three scenarios.- If
nums[m] < target, it indicates thattargetis in the interval[m + 1, j], thus seti = m + 1. - If
nums[m] > target, it indicates thattargetis in the interval[i, m - 1], thus setj = m - 1. - If
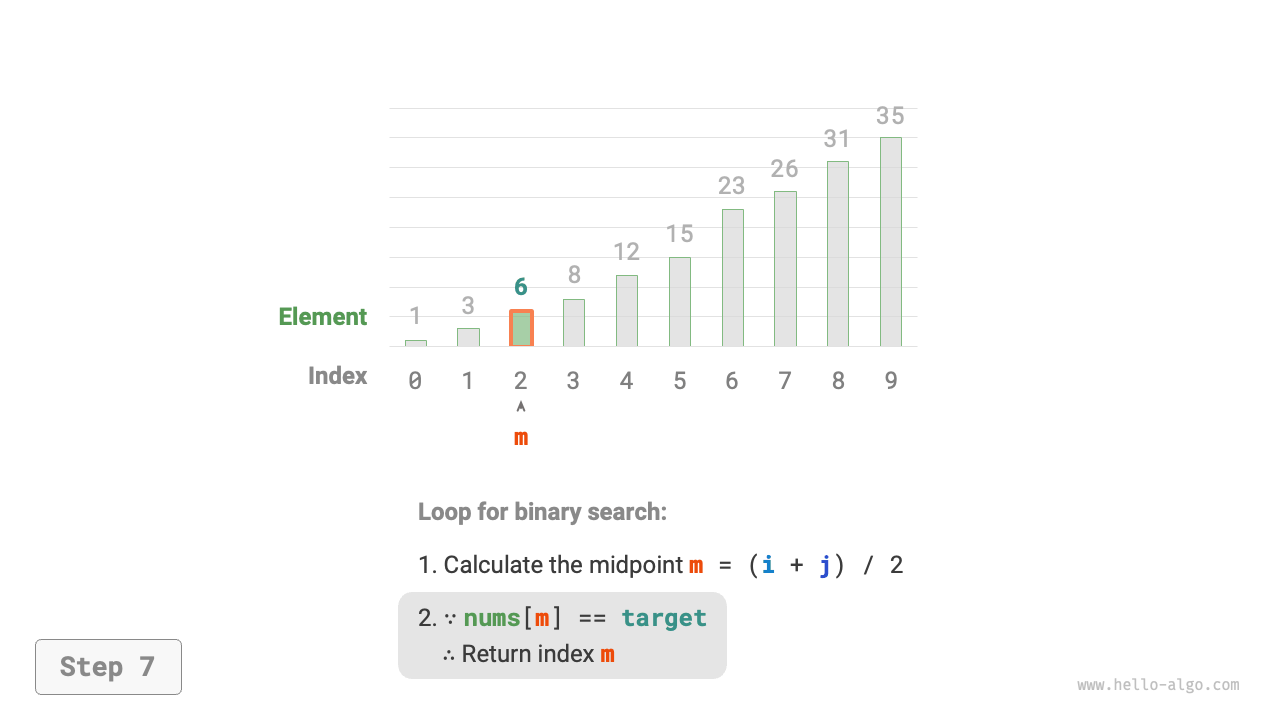
nums[m] = target, it indicates thattargetis found, thus return indexm.
- If
If the array does not contain the target element, the search interval will eventually reduce to empty. In this case, return -1.
=== "<1>"
=== "<2>"
=== "<3>"
=== "<4>"
=== "<5>"
=== "<6>"
=== "<7>"
It's worth noting that since i and j are both of type int, i + j might exceed the range of int type. To avoid large number overflow, we usually use the formula m = \lfloor {i + (j - i) / 2} \rfloor to calculate the midpoint.
The code is as follows:
[file]{binary_search}-[class]{}-[func]{binary_search}
Time complexity is $O(\log n)$ : In the binary loop, the interval reduces by half each round, hence the number of iterations is \log_2 n.
Space complexity is $O(1)$ : Pointers i and j use constant size space.
Interval representation methods
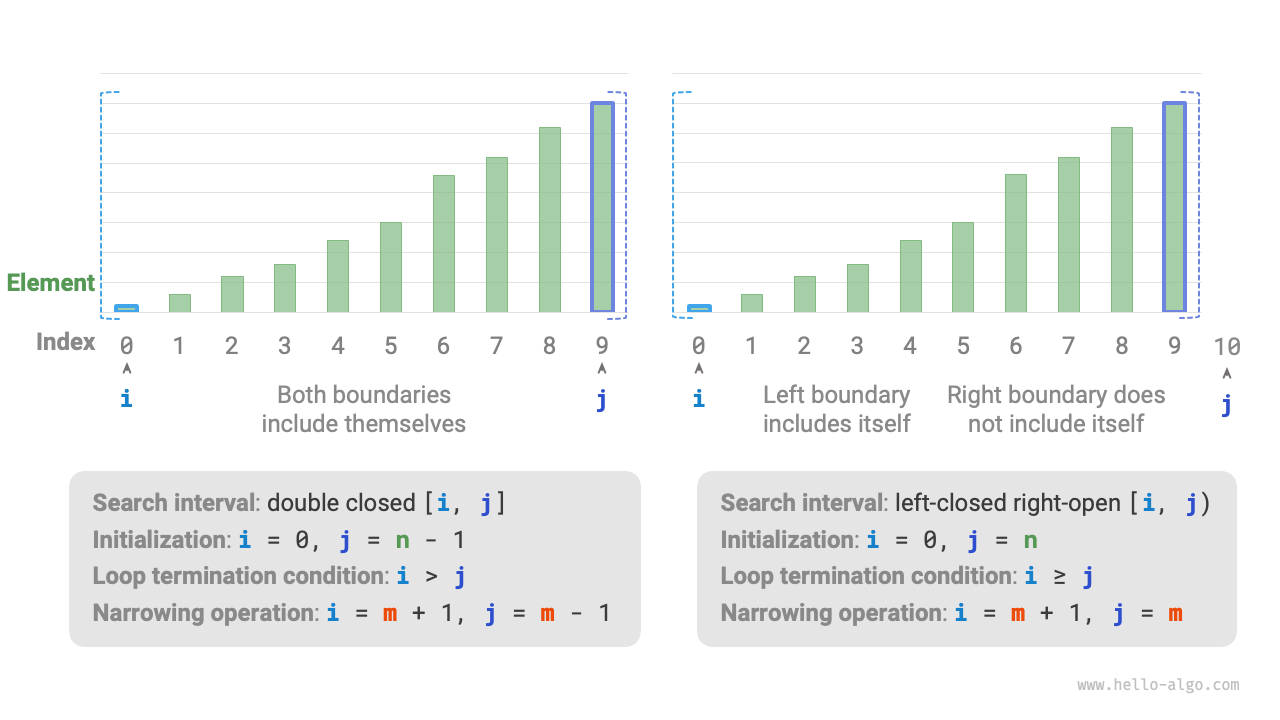
Besides the aforementioned closed interval, a common interval representation is the "left-closed right-open" interval, defined as [0, n), where the left boundary includes itself, and the right boundary does not include itself. In this representation, the interval [i, j) is empty when i = j.
We can implement a binary search algorithm with the same functionality based on this representation:
[file]{binary_search}-[class]{}-[func]{binary_search_lcro}
As shown in the figure below, in the two types of interval representations, the initialization of the binary search algorithm, the loop condition, and the narrowing interval operation are different.
Since both boundaries in the "closed interval" representation are defined as closed, the operations to narrow the interval through pointers i and j are also symmetrical. This makes it less prone to errors, therefore, it is generally recommended to use the "closed interval" approach.
Advantages and limitations
Binary search performs well in both time and space aspects.
- Binary search is time-efficient. With large data volumes, the logarithmic time complexity has a significant advantage. For instance, when the data size
n = 2^{20}, linear search requires2^{20} = 1048576iterations, while binary search only requires\log_2 2^{20} = 20iterations. - Binary search does not require extra space. Compared to search algorithms that rely on additional space (like hash search), binary search is more space-efficient.
However, binary search is not suitable for all situations, mainly for the following reasons.
- Binary search is only applicable to ordered data. If the input data is unordered, it is not worth sorting it just to use binary search, as sorting algorithms typically have a time complexity of
O(n \log n), which is higher than both linear and binary search. For scenarios with frequent element insertion to maintain array order, inserting elements into specific positions has a time complexity ofO(n), which is also quite costly. - Binary search is only applicable to arrays. Binary search requires non-continuous (jumping) element access, which is inefficient in linked lists, thus not suitable for use in linked lists or data structures based on linked lists.
- With small data volumes, linear search performs better. In linear search, each round only requires 1 decision operation; whereas in binary search, it involves 1 addition, 1 division, 1 to 3 decision operations, 1 addition (subtraction), totaling 4 to 6 operations; therefore, when data volume
nis small, linear search can be faster than binary search.