| .. | ||
| ScreenShot | ||
| carui.ui | ||
| ControlCar.py | ||
| README.md | ||
| server.py | ||
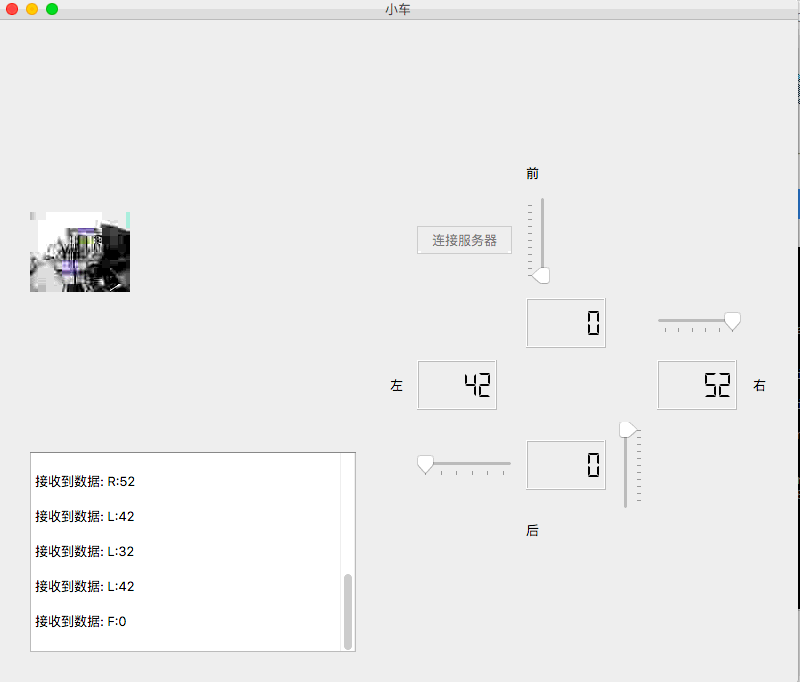
通过TCP连接树莓派控制小车的简单例子
需求:
- 通过TCP连接到树莓派控制小车前后左右
- 前进:0-100, 发送命令为F:2
- 后退:0-100, 发送命令为B:2
- 向左:32-42, 发送命令为L:2
- 向右:42-52, 发送命令为R:2
注意:
- 这里只用了UI文件做界面,并没有转换为python代码
- server.py只是做个本地echo服务器用来测试命令是否正常,依赖tornado库,可以通过pip install tornado来安装
- 另外需要做粘包处理,以(\n)作为粘包符
- 由于wifi能力不行,发送图片要尽量小
说明:
- QTcpSocket.connected 服务连接成功后触发该信号
- QTcpSocket.disconnected 服务器丢失连接触发该信号
- QTcpSocket.readyRead 服务器返回数据触发该信号
- QTcpSocket.error 连接报错触发该信号(连接超时、服务器断开等等)
截图